
河北出售晶圆扶梯报价
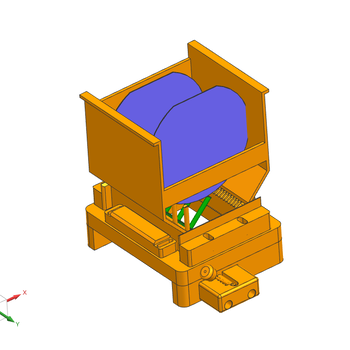
晶圆升降机构隶属于晶圆自动传输系统,主要承担着与晶圆装卸机械手配合完成晶圆在加工工件台与预对准设备、晶圆盒之间交接的工作。大尺寸的晶圆重量增加,更易变形破损,Z 轴方向上的定位(重复定位)精度直接影响晶圆在过渡过程中平稳安全性;同时要考虑到结构紧凑、洁净化、低散热对环境影响尽量小。
近年来,国内晶圆升降机构的发展也很迅速。一些较早投入应用的晶圆传输机构。前端支持品圆机械手爪随滑块在导轨内上下运动,由直流电机驱动,该机构升降行程较小、精度低,速度慢,缺少晶圆保护装置。另外交接晶圆过程中,吸附系统使晶圆中间变形,定位精度低,开环控制易造成晶圆窜动和损坏,同时对驱动电机造成冲击。
晶圆升降机构需要完成升降运动,采用直线电机驱动。直线电机是一种将电能直接转换成直线运动,而不需要通过任何中间转换机构的新颖电机。其代表是音圈电机,音圈的绕制方向与磁场方向垂直,具有喇叭状的辐射磁场,音圈通电后在磁场中会产生力,力的大小与施加在线圈上的电流成比例。电机运动形式可以为直线或者圆弧,主要用在精密仪器上。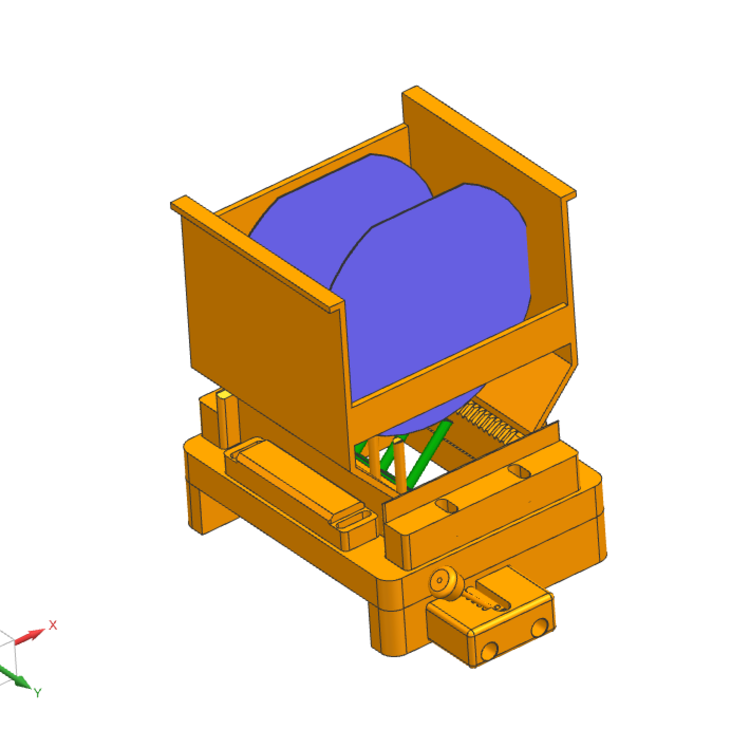
位移是物体在运动过程中位置变化,它与移动量有关。小位移通常用应变式、涡流式、差动变压器式、电感式、霍尔传感器来检测,大位移常用感应同步器、光栅、容栅、磁栅等传感技术来测量。本文采用测量直线位移量的传感器,具体有电感式位移传感器、电容式位移传感器、光电式位移传感器、超声波位移传感器、霍尔式位移传感器。
晶圆升降机构中的真空吸附系统是用来吸附和释放品圆,从而进行晶圆的检测和传输,以便实现传输的。机构要求晶圆定位精度高,真空吸附系统在吸附和释放晶圆过程中尽量减小冲击,要求吸附的时候应当缓慢地增加或减小真空压力,使得压力变化为斜坡变化,大限度减小晶圆在真空吸附下精度的损失。
晶圆升降系统是半导体制造中重要的工艺设备之一,常规的晶圆升降系统通常有两种:其中一种晶圆升降系统包括:顶针、静电吸盘、组合支架及三个升降气缸,所述顶针通过所述组合支架固定在所述升降气缸上,当所述顶针托载晶圆时,所述升降气缸可以控制组合支架及托载晶圆的所述顶针相对静电吸盘上升或者下降一定的高度。但是,当组合支架使用时间过长时容易损坏,导致顶针,下降的高度不够,使得顶针与晶圆的背面的间距过小,进而导致晶圆上累积的电荷在该顶针区域局部放电起辉造成放电,从而导致晶圆良率损失。
另一种晶圆升降系统包括三个顶针、静电吸盘及三个升降气缸,一个升降气缸控制一个顶针的升降,采用该装置进行晶圆升降时发现,由于顶针的上升受升降气缸压力波动的影响,导致三个顶针的下降高度存在差异,使得其中某个顶针与晶圆的背面的间距过小,进而导致晶圆上累积的电荷在该顶针区域局部放电起辉造成放电,从而导致晶圆良率损失。
晶圆生产过程中,需要采用多种工艺进行处理。处理工艺多是在设备内进行。如润湿处理,需在润湿槽内进行。电镀需要在电镀槽内进行。而现有技术中,将湿晶圆放入或取出处理装置的一系列工序都需人工操作,一方面会降低生产效率,提高生产成本,另一方面也会因人工操作不当导致晶圆的损坏,降低生产合格率。同时,人工操作所需空间大,空间利用率低。人工操作的另一个弊端是劳动强度大,效率低,无法满足大规模生产的需要。人工操作还会导致工人接触电镀液或润湿液而危害工人身体健康。
有些机器具有缓冲存放系统,使工艺过程总可以有新的晶圆准备被加工(或给图形化设备的放大掩模版),从而使机器的效率大化。这些称为储料器。操作员将片匣放在机器的上载器上,按下开始键,然后的工艺过程就交给机器来做。在300mm晶圆的水平,片匣可能会被一个单的晶圆承载器或输运器所替代。
在制造IC的生产线中,已全面采用了计算机控制和机器人搬运。对于复杂的作人为失误在所难免,而且在洁净室中,即使操作者身着无尘服,也不免造成污染。采用计算机控制和机器人搬运,可提高产品质量和安全性,从而降低成本。
最新产品
更多









热门信息
热门产品
-
美国FITLINE原装正品teflon特氟龙PFA接头PFA外牙直通MC4-2N-1
-
PTFE清洗花篮手提晶圆盒硅片清洗花篮特氟龙手提式清洗篮四氟花篮
-
美国因特格氮气喷枪EntegrisNitrogenSprayGuns
-
特氟龙PFA电磁阀NResearch225P01/225P02/225P03/225P04/360P01-P04/648P01-P04
-
FURON传输软管/Teflon特氟龙/PFA/硅胶VERSILON™
-
美国JACO卡套式PP塑料螺帽接头盲盖/闷头盖帽堵头BLD内丝接口
-
美国进口NACOM吸水阀PTFE抽吸阀KNAA-1866CHK三通式吸水阀PTFE
-
美国FITLINE进口PFA管扩管器PFA管冷扩钳PFA手动扩管工具FT-4
-
日本原装进口chemisPEEK塑料迷你弹簧2.2-3-20L-8512-181024-U
-
美国进口NACOM调压阀PTFE减压阀溢流阀PTFE手动调压阀RV4-44-KA