南京定制晶圆扶梯多少钱一个





- 面议
- 2024-11-01 04:19:42
- 晶圆扶梯,晶圆扶梯,晶圆读号器,晶圆查看器
- 张先生 15962404138
- 苏州硕世微电子有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

信息介绍
详细参数
晶圆升降机构隶属于晶圆自动传输系统,主要承担着与晶圆装卸机械手配合完成晶圆在加工工件台与预对准设备、晶圆盒之间交接的工作。大尺寸的晶圆重量增加,更易变形破损,Z 轴方向上的定位(重复定位)精度直接影响晶圆在过渡过程中平稳安全性;同时要考虑到结构紧凑、洁净化、低散热对环境影响尽量小。
近年来,国内晶圆升降机构的发展也很迅速。一些较早投入应用的晶圆传输机构。前端支持品圆机械手爪随滑块在导轨内上下运动,由直流电机驱动,该机构升降行程较小、精度低,速度慢,缺少晶圆保护装置。另外交接晶圆过程中,吸附系统使晶圆中间变形,定位精度低,开环控制易造成晶圆窜动和损坏,同时对驱动电机造成冲击。
电机驱动滑块沿导轨导向运动,检测单元反馈位置信号控制机构运动,真空吸附单元与导轨滑块用连接块连接,跟随滑块运动运载晶圆,其上加装缓冲装置单元,使吸管与晶圆、晶圆与上下臂和吸盘接触过程中防止吸附的晶圆产生变形甚至破损,以及减小对电机的冲击。
位移是物体在运动过程中位置变化,它与移动量有关。小位移通常用应变式、涡流式、差动变压器式、电感式、霍尔传感器来检测,大位移常用感应同步器、光栅、容栅、磁栅等传感技术来测量。本文采用测量直线位移量的传感器,具体有电感式位移传感器、电容式位移传感器、光电式位移传感器、超声波位移传感器、霍尔式位移传感器。
晶圆升降机构是自动控制的,通过音圈电机完成升降运动。如果电机失控此时机构正处于升降运动中,运动部件会上升到高点停不下来顶住外部结构过长时间从而损坏电机。为了避免以上问题,在机构中增加保护措施,确保机构运行的安全性。
晶圆升降系统是半导体制造中重要的工艺设备之一,常规的晶圆升降系统通常有两种:其中一种晶圆升降系统包括:顶针、静电吸盘、组合支架及三个升降气缸,所述顶针通过所述组合支架固定在所述升降气缸上,当所述顶针托载晶圆时,所述升降气缸可以控制组合支架及托载晶圆的所述顶针相对静电吸盘上升或者下降一定的高度。但是,当组合支架使用时间过长时容易损坏,导致顶针,下降的高度不够,使得顶针与晶圆的背面的间距过小,进而导致晶圆上累积的电荷在该顶针区域局部放电起辉造成放电,从而导致晶圆良率损失。
另一种晶圆升降系统包括三个顶针、静电吸盘及三个升降气缸,一个升降气缸控制一个顶针的升降,采用该装置进行晶圆升降时发现,由于顶针的上升受升降气缸压力波动的影响,导致三个顶针的下降高度存在差异,使得其中某个顶针与晶圆的背面的间距过小,进而导致晶圆上累积的电荷在该顶针区域局部放电起辉造成放电,从而导致晶圆良率损失。
晶圆升降装置,包括静电卡盘及位于静电卡盘下方的多个升降组件,静电卡盘上放置有一晶圆,每个升降组件均包括驱动单元、位移监测单元及顶针,驱动单元与顶针连接并驱动顶针上升或下降以顶起或远离晶圆,位移监测单元位于驱动单元上,并用于监测顶针上升或下降的高度并反馈给驱动单元。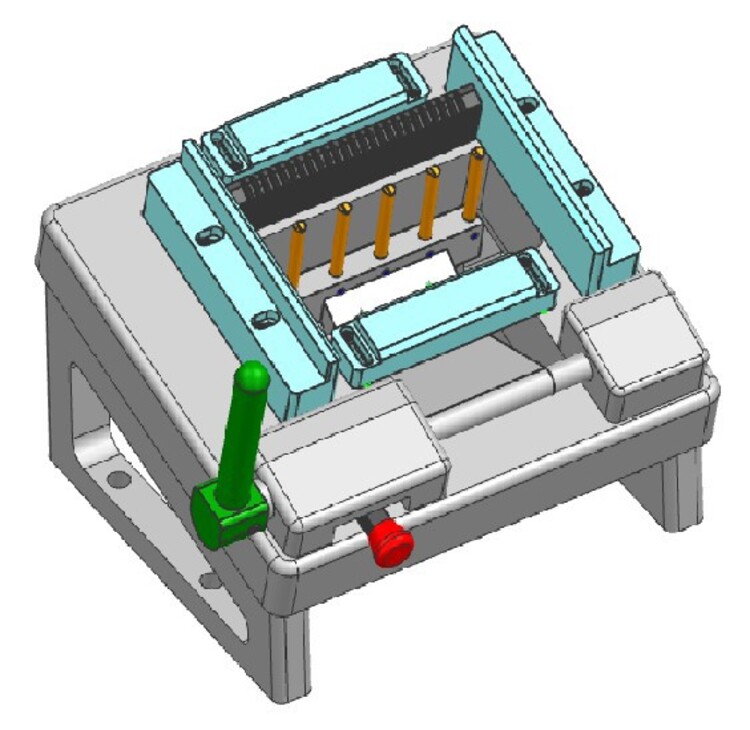
集成电路行业发展迅速,对芯片产品的良率要求日益增高,晶圆测试能够在芯片未进行切割、引线、封装等多重后道工序加工前进行测试,减少不良品在后续加工中的严重浪费,所以急需晶圆测试设备达到高速、、高稳定性的要求。晶圆测试设备达到高速、、高稳定性的要求关键在于升降机构。目前晶圆测试装备采用的升降机构顶升力较小,顶升稳定性较差,精度低,而且有些顶升机构结构复杂,制造成本尚。
自动化的下一个水平是加载和卸载品圆。业界己经将晶圆片匣确立为主要的晶圆承载体和传输体。片匣通过多种机械原理被放置在机器、升降机和/或晶圆抽取器上,或机械手将晶圆输送到特定的工艺室、旋转卡盘。在某些工艺中,如一些工艺反应管,整个片匣都放在工艺反应室中。这一水平的自动化称为“单按钮”操作c通过一个按钮,操作员激活加载系统,晶圆被加工然后再回到片匣中。在工艺周期的后,机器发出警报声或点亮指示灯,操作员再将片匣移走。
- 晶圆扶梯,晶圆扶梯,晶圆读号器,晶圆查看器
- 半导体设备
- 张先生



